![]()
Customize your Scenario
Assembly nodes
Several nodes can be used to describe your assembly process in the Scenario window. To open it to go INTERACT > Scenarize > Show scenario graph.
Placing
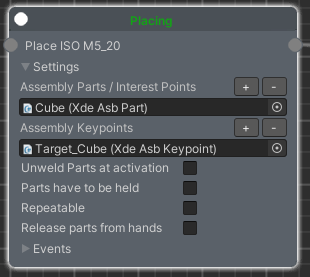
The placing step gives target positions (Xde Asb Keypoint) to assembly parts (Xde Asb Part).
- Unweld Parts at activation: If the assembly part used in this step is welded before this placing step, ticking this option will unweld it at activation.
- Parts have to be held : The part must be grabbed when placed on the target to validate this step. For example, if you just "push" the part using collisions and the part meet the target, the placing step won't be validated.
- Repeatable
- Release parts from hands
Step

The assembly step do not perform any action inside an assembly scenario. However, it can be useful to create a dependency that act as a blocking step then only an external call of its function “Complete()” could unlock the step and allow the scenario to continue.
Tempo
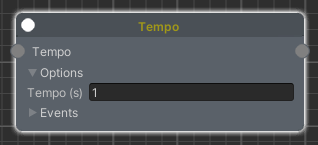
The tempo step creates a delay between two steps. It can be useful to wait between 2 Robot Move steps.
- Tempo: Time of wait (in second) before the step is completed.
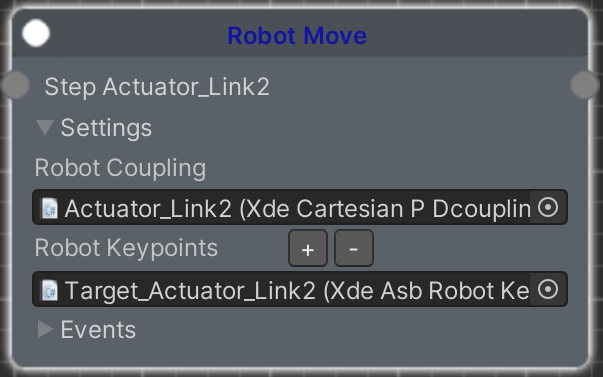
Robot Move
 An Assembly Step is one step of the Assembly. When activated, they require to fulfill an action to be rendered inactive again.
An Assembly Step is one step of the Assembly. When activated, they require to fulfill an action to be rendered inactive again.
The Xde Asb Robot Move component (or Robot Move in the scenario graph) is a specific assembly step which gives target positions (Xde Asb Robot Keypoint) to actuator parts (Xde Cartesian PD Coupling).
You have to set the properties of your actuator part according to your robot specs.
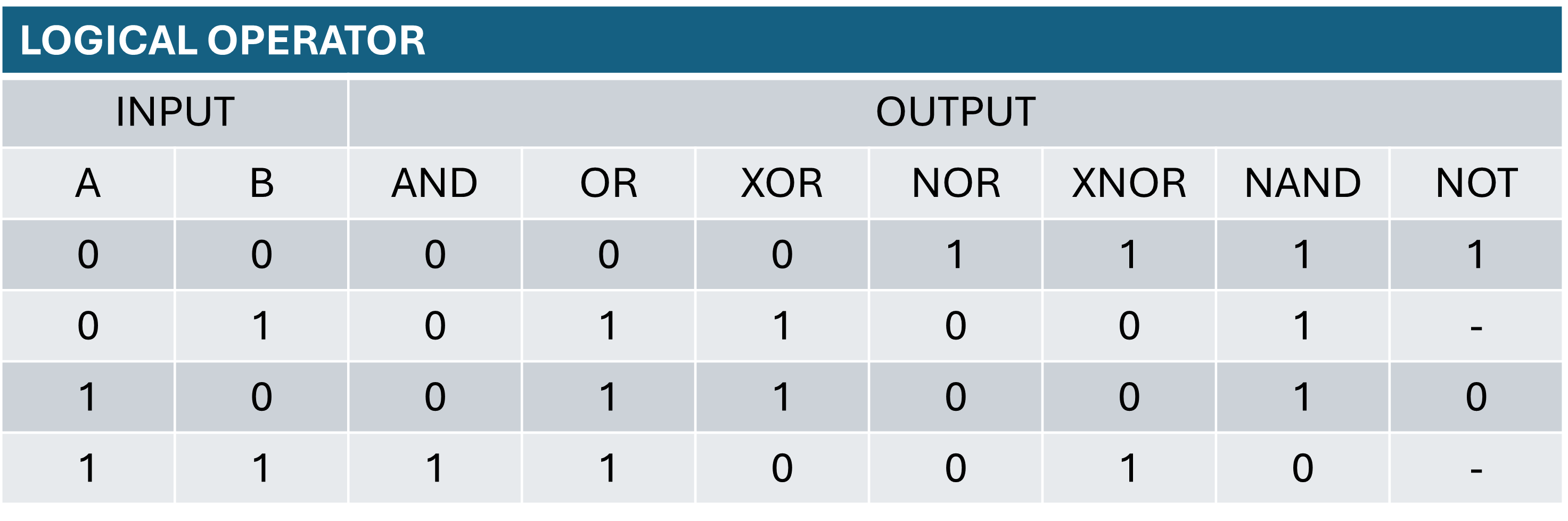
LogicalOperator
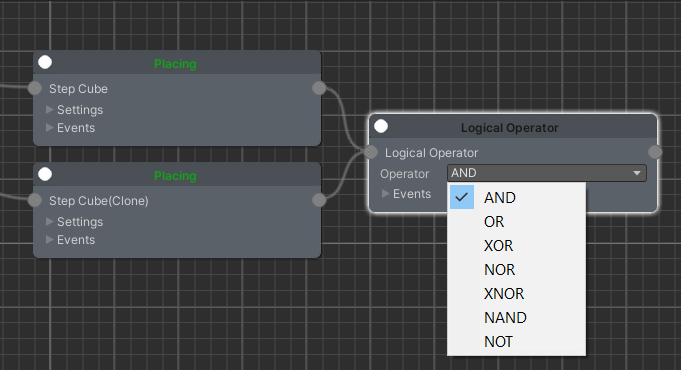
The logical operator step performs a logical test between its dependencies to determine if it is completed or not.
Events
All assembly nodes contain a tab called events. It allows you to change some component properties of your game object. These actions are only triggered on specific events. For example to unweld or activate another part when a keypoint is reached.
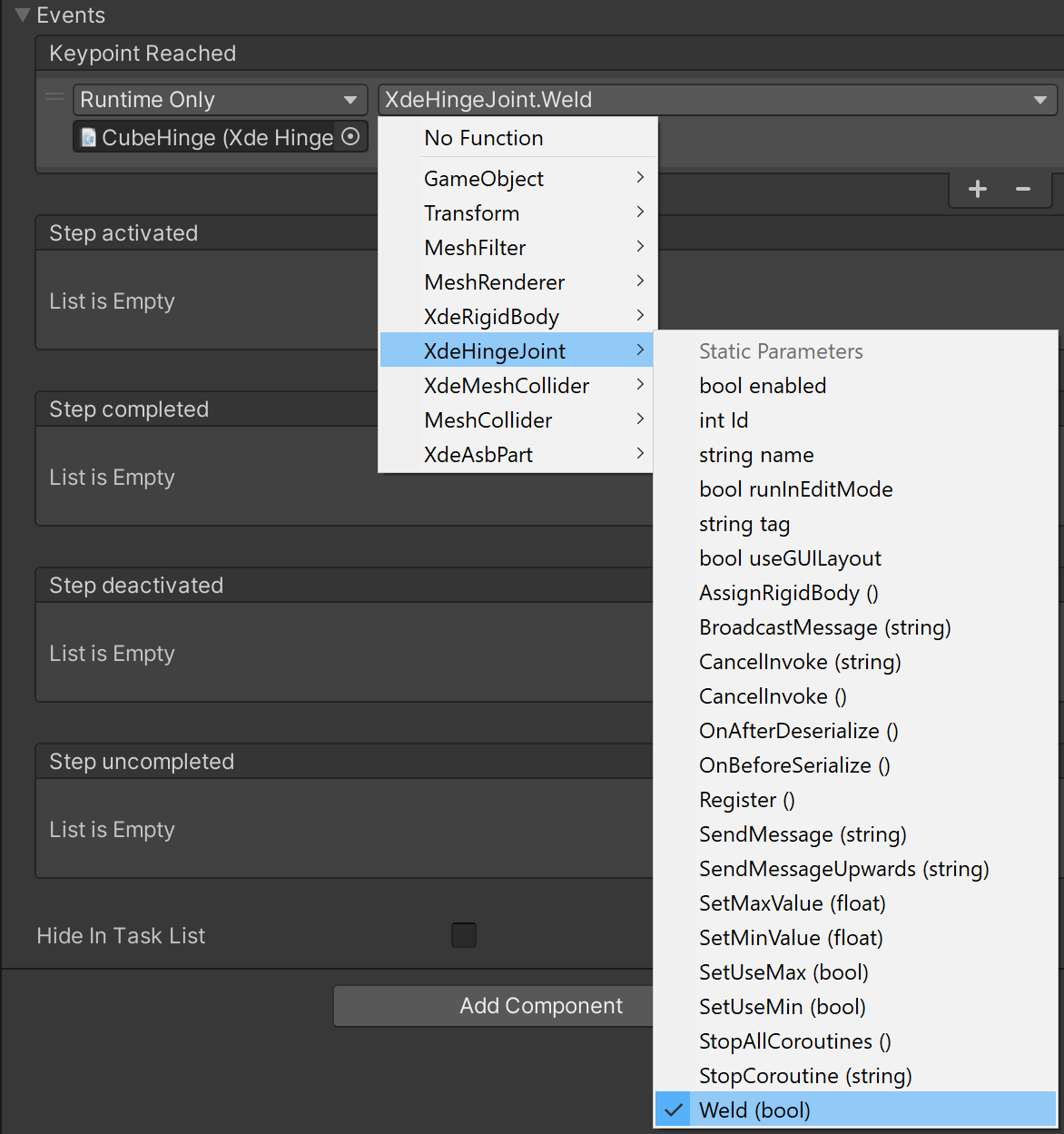
Some events are only available with certain assembly nodes. See the list below to know when those events are triggered :
| Events | Triggering action |
|---|---|
| Keypoint reached | Performs the event when assembly part has reached its target (keypoint). |
| Keypoint released | Performs the event when assembly part is released from its target (keypoint). Works only if you have multiple assembly parts and keypoints in this step. |
| Part grasped | These events are executed when the assembly part is grasped by the user in VR. |
| Step activated | Performs the event at the beginning of this step. |
| Step completed | Performs the event when this step is completed. You might prefer this option when using multiple keypoints in one step for example. |
| Step deactivated | Performs the event when this step is deactivated. |
| Step uncompleted | Performs the event when this step is uncompleted. |