How To Physicalize
XDE Physics simulates the dynamics and kinematics of rigid bodies.
To ‘physicalize’ a 3D object means creating a RigidBody component attached to the object along with mesh colliders.
When you physicalize an object, INTERACT automatically creates three components:
- The Rigid Body: attached to the parent object, it defines the physical properties of the object (mass, inertia, collision)
- The Joint: also attached to the parent object, it describes how rigid bodies move with respect to each other.
- The Mesh colliders: attached to each mesh contained in the parent object, they define the shape of an object for the purpose of physical collisions.
A rigidbody can have multiple mesh colliders, but will only have one joint.
To physicalize, select an object in the hierarchy and click on INTERACT > Physics > Physicalize object in the toolbar menu (shortcut: Shift+P).
Then in the pop-up menu, you can configure:
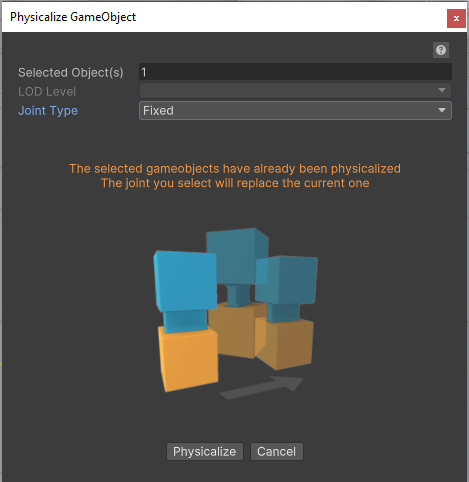
Joint Type: used to configure the kinematic joint
- Free: the part is free to move in the 6 degrees of freedom
- Fixed: the part is fixed in the world or attached to another part
- Hinge: a pivot type articulation (1 rotation allowed)
- Prismatic: a prismatic type articulation (1 translation allowed)
- Ball: a ball joint type (3 rotations allowed)
- Weldable: hybrid free/fixed joint. The part is free to move and can be welded to another RigidBody
- Helical: screw-like motion (1 translation and 1 rotation that are linked together)
- Mapped: relation between two joints
- Cylindrical: both translation and rotation
- Planar: constrains on a plane and also allows rotation
- Point on line: constrains translation along a single axis, but additionally requires complete freedom to rotate around all axes
ShortCut
When physicalizing your object, in the Physicalize Window, you can press the Alpha key number associated with the joint (Alpha 1 for Free, Alpha 2 for Fixed...) to select it directly.
LOD Level: the Level of Detail used for collision (if the part has been imported with LODs).
Selecting LOD0 would give a very fine but resource consuming collision detection (close to the actual mesh) while selecting a higher LOD would make the collision detection less precise but more efficient.